micro:bit用ロボットベース(ラインセンサー)
本商品を使って配膳ロボットを作る場合のサンプルプログラム(Python)を紹介しています。
※Rev2(2023年7月3日以降出荷分)に対応したプログラムとなります。Rev1 には対応していません。Rev1、Rev2 に関しては「仕様」ページをご確認ください。
開発環境
Micro:bit教育財団が推奨している Python Editor をお薦めします。
- Python Editor:http://python.microbit.org/
- Python ガイド:https://microbit.org/get-started/user-guide/python-editor/
モジュール
ロボットベース(ラインセンサー)を配膳ロボットとして使うためのモジュールです。ファイル「haizen.py」をダウンロードして、Python Editor にて読み込んでください。
haizen.py
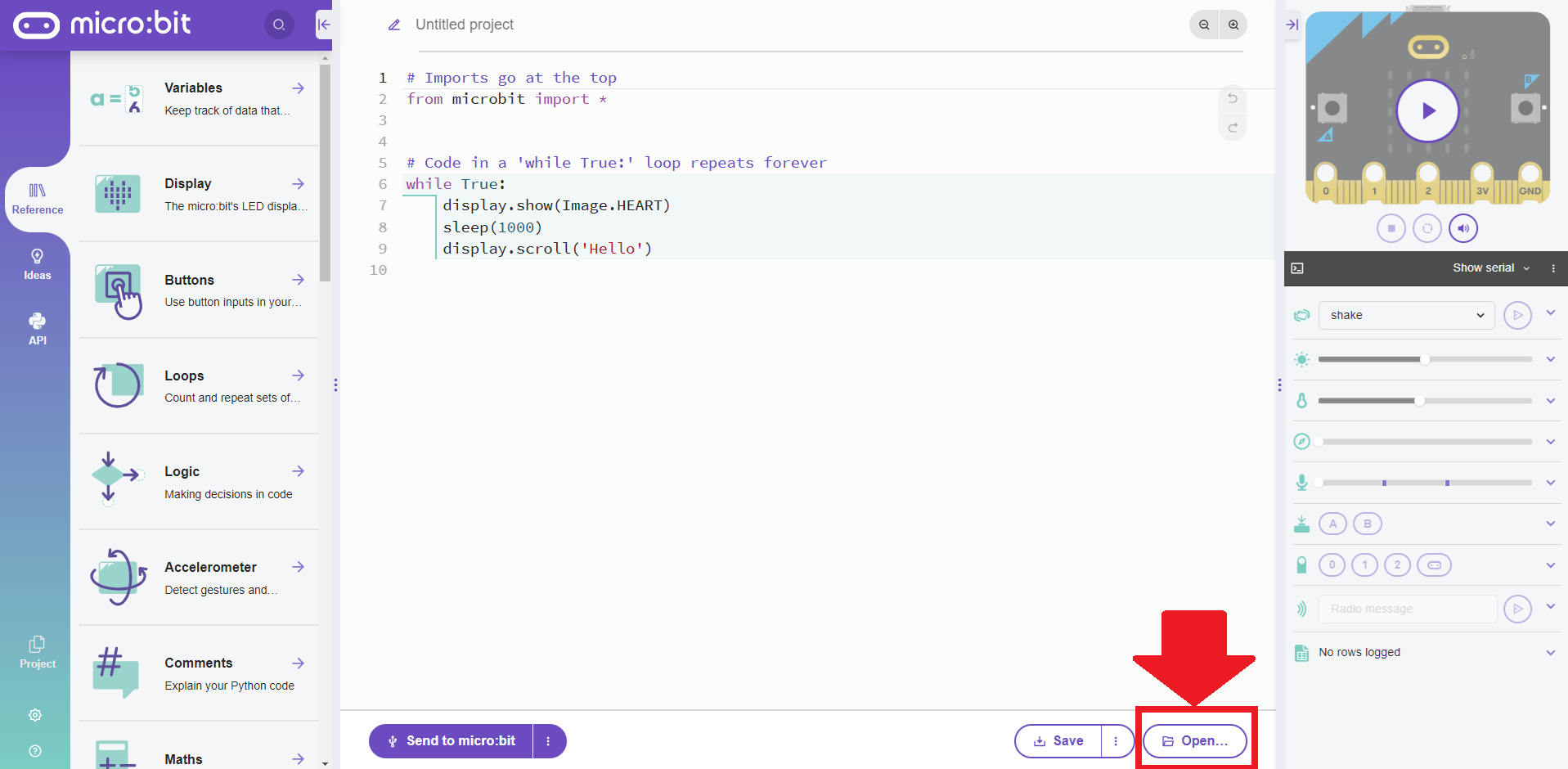
開発画面下方にある「Open」ボタンから、ダウンロードした haizen.py を読み込んでください。
配膳プログラムのサンプル
変数「target_table」で設定した値とテーブルマーカーを検出した回数が一致したら2秒間ストップし、再度走行します。ゴールライン(ライン読み取り用のセンサーP1、P2が"黒"となる部分)を検出したらストップします。micro:bitのLED画面には、テーブルマーカーを検出した回数を表示しています。
サンプルプログラムを動かしている様子。変数「target_table」の値は「2」です。

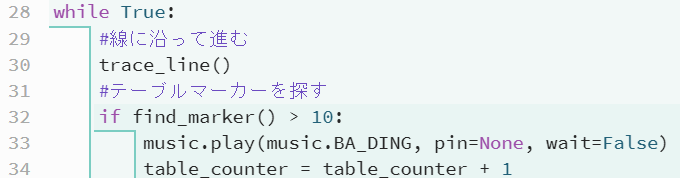
P0センサーの動作確認を行いつつ(動作確認プログラム)、「if find_marker() > 10」の「10」部分(32行目。マーカー検出の時間(ミリ秒))を調整してみてください。
初期不良/保証について
ご購入に関するご案内 > 保証について
をご確認ください。
お問い合わせ
おまとめでの購入をお考えのお客様には、ご要望により個別手配にて対応いたします。 ご購入に関するご案内 をご確認ください。