micro:bit のロゴマークを触っている間だけ、宝箱のフタが開きます。
フタが開く条件をアレンジして、自分だけが開けれる宝箱を作りましょう!
フタはサーボモーターを使って開閉します。
使っている機能
- タッチセンサー
- 入出力ピン(サーボモーターに利用)
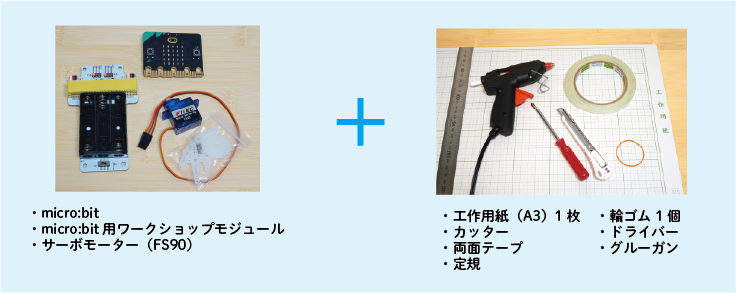
用意するもの
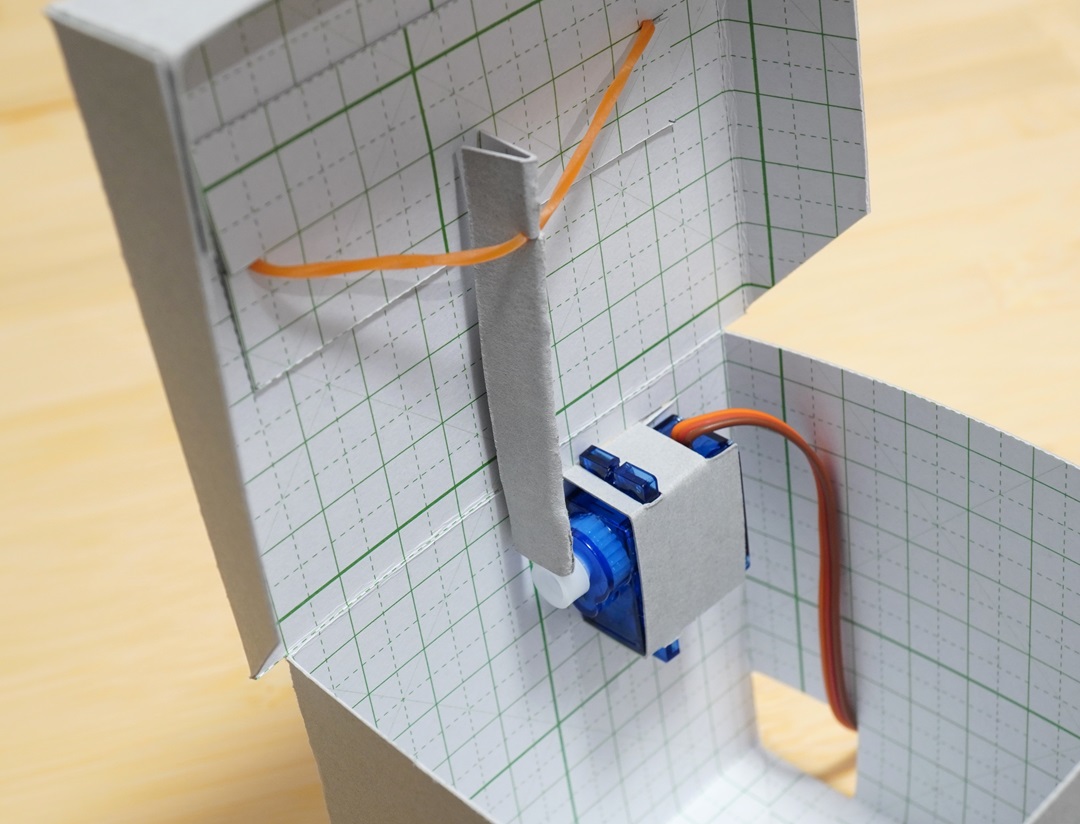
組立
サーボモーターについて
サーボモーターを初めて使う人は、まずチュートリアルの「サーボホーン」「micro:bitとの接続方法」「プログラミング(MakeCode)」をチェックしましょう。
※初めて micro:bit で遊ぶ場合は、micro:bit チュートリアル「初めてのプログラミング」にチャレンジしてみてください。
サーボホーンのとりつけ
角度「180」のとき、左画像のようにフタが開いているようにします。
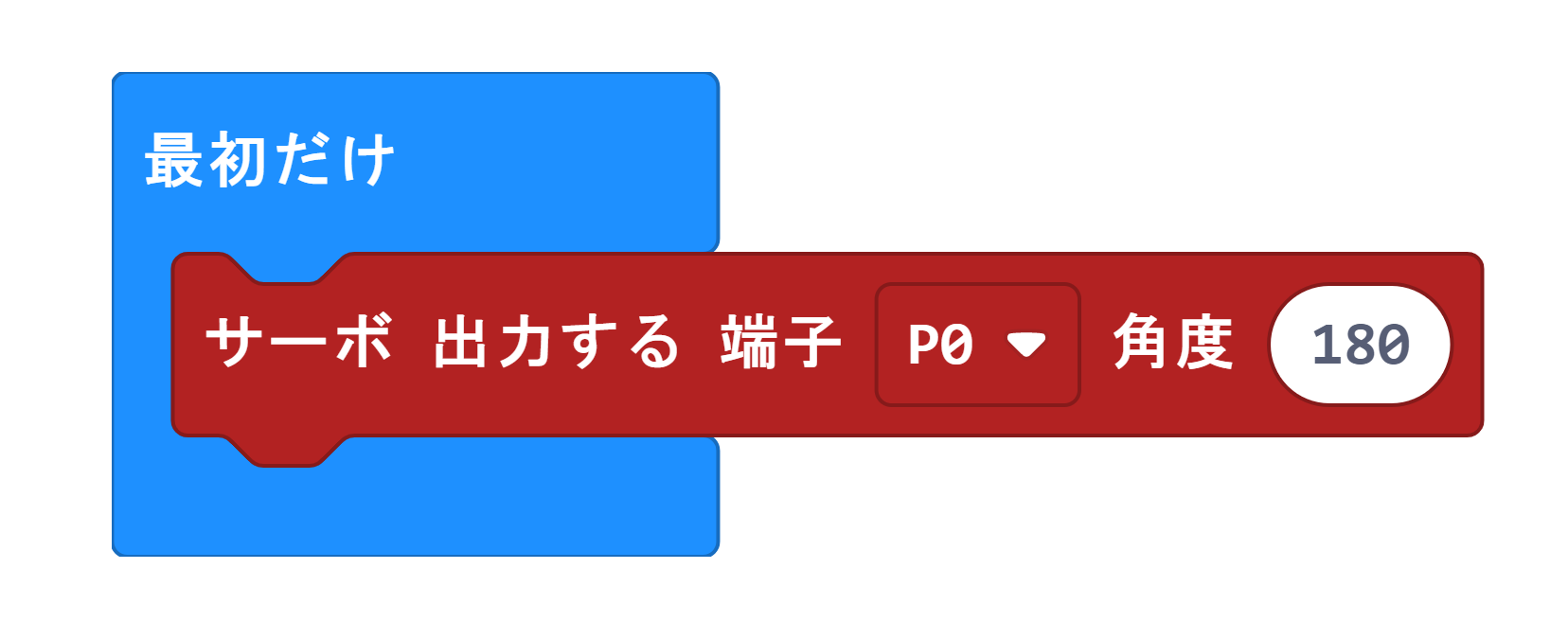
こちらのプログラムを micro:bit に書き込んで、ワークショップモジュールの電源をONにしてみてください。
※「端子」はサーボモーターを接続しているピン番号に設定してください(詳細)。
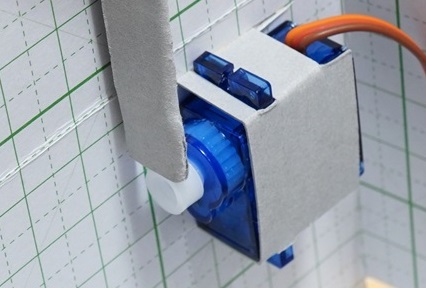
1秒ほど待つと、サーボモーターの軸が回転したかと思います。一旦ワークショップモジュールの電源をOFFにして、左画像の向きで、サーボホーンをサーボモーターの軸に、はめこんでください。
※もともとサーボモーターの軸が180°の向きだった場合、電源をONにしても軸は動きません。
もう一度、ワークショップモジュールの電源をONにしてください。左画像のように、フタが開いていたらOKです。
プログラム
micro:bit のロゴマーク(タッチセンサー)を触っている間だけ、サーボモーターが動き、箱のフタが開くようにしてみました
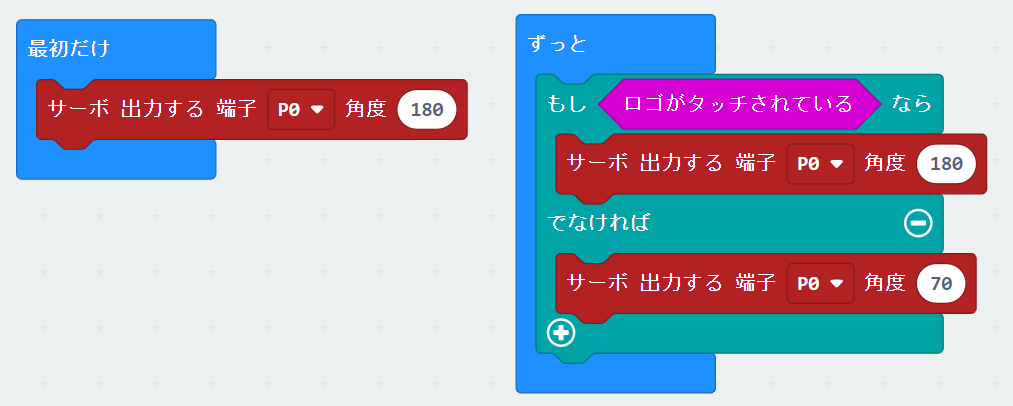
プログラムURL:https://makecode.microbit.org/_cTyeztXksTx9
※こちら画面のプログラムをMakeCodeで開く方法はチュートリアルを確認してください。
ロゴマークを触っているかどうかで動作を分けています。
このように、条件を指定して、条件を満たす場合/満たさない場合で動作を分けるプログラムを条件判断といいます。 「条件判断」のプログラムを初めて作る人は、チュートリアルも確認してみましょう。
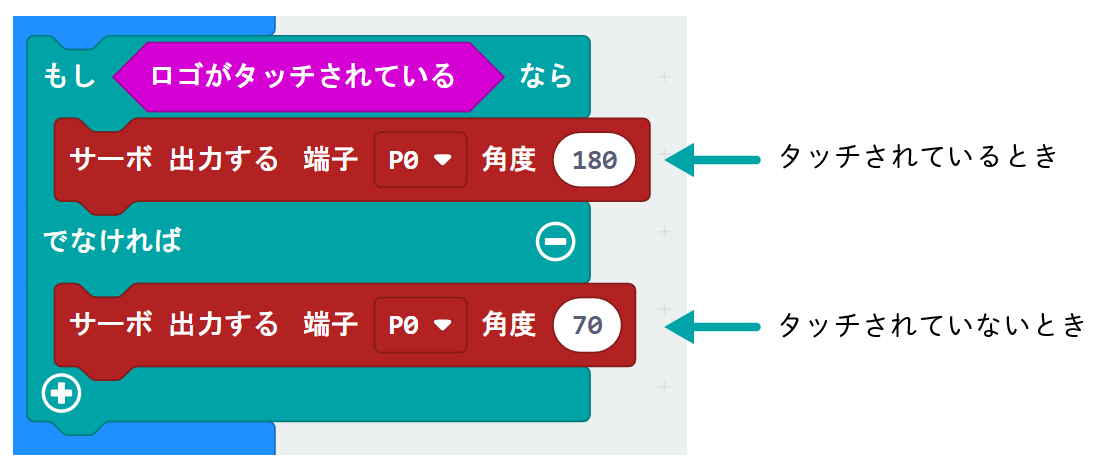
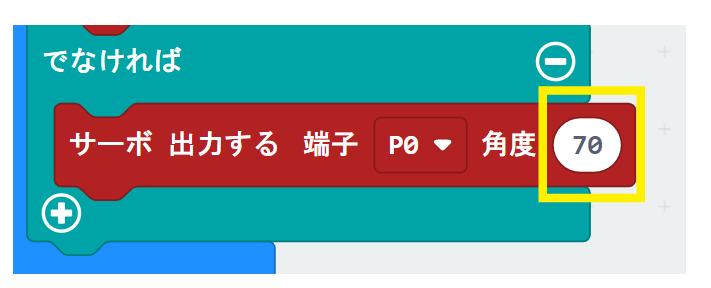 角度「180」のときにフタが開いた状態となるようにサーボホーンを取り付けました。
そのため、角度「70」あたりのときに、フタが閉じた状態になるはずです。
もしフタの閉じ方があまかったら、角度「70」の数値を「60」にしてみるなど調整してみてください。
角度「180」のときにフタが開いた状態となるようにサーボホーンを取り付けました。
そのため、角度「70」あたりのときに、フタが閉じた状態になるはずです。
もしフタの閉じ方があまかったら、角度「70」の数値を「60」にしてみるなど調整してみてください。発展:複数のセンサーを使って開く
ロゴマークをタッチしながら、micro:bitを右に傾けている間だけフタが開くようにしてみました。
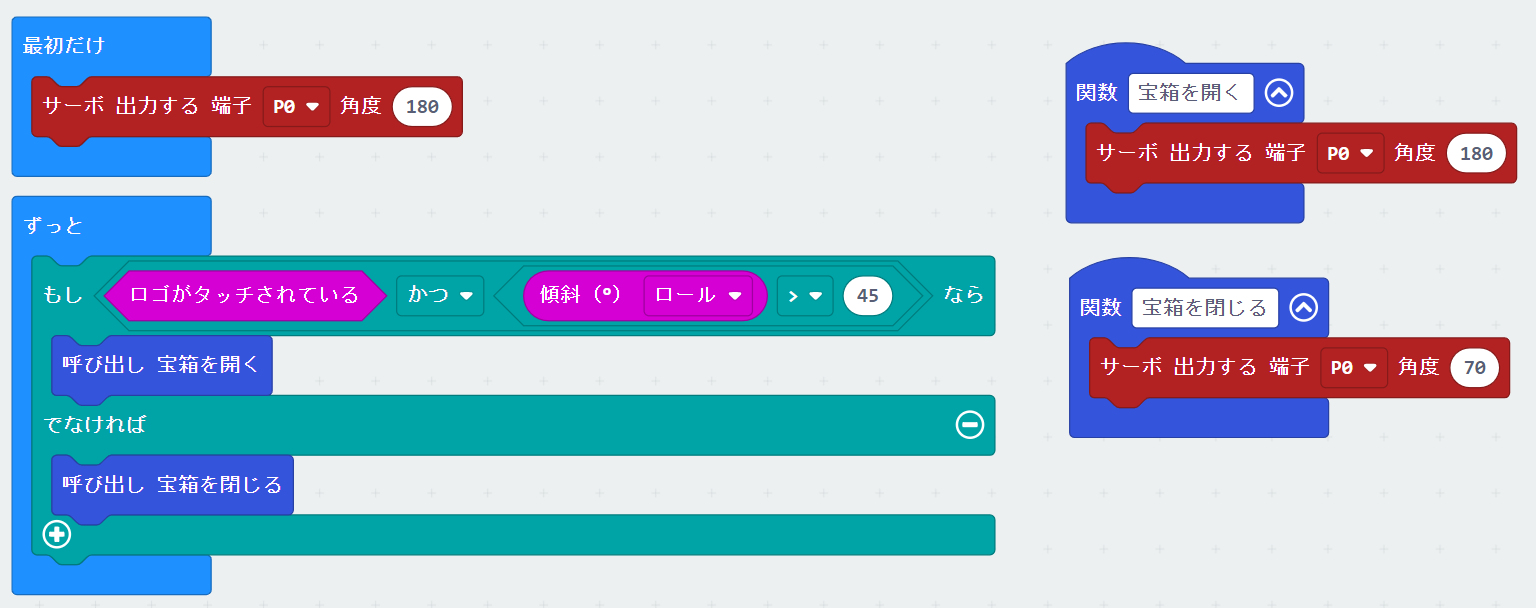
プログラムURL:https://makecode.microbit.org/_czKfVuFx35sk
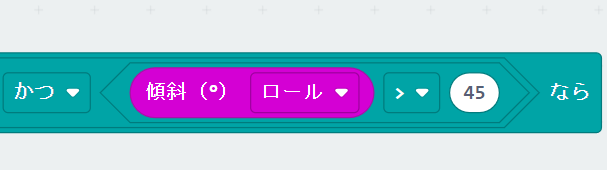 右に傾けているかどうかは、「傾斜(°)ロール」ブロックを使って調べています。
右に傾けているかどうかは、「傾斜(°)ロール」ブロックを使って調べています。
 サーボモーターを動かす部分を関数にすることで、宝箱の開閉どちらを行っているか、わかりやすくしてみました。
サーボモーターを動かす部分を関数にすることで、宝箱の開閉どちらを行っているか、わかりやすくしてみました。
micro:bit のいろいろなセンサーを使って、自分だけの秘密の"カギ"を作りましょう!
関連作例