bitPak:Drive
micro:bitで動く2輪車を作ります。
タイヤがついた回転サーボモーターを2つ使います。
使っている機能
- 入出力ピン(回転サーボモーターを制御)
用意するもの
- micro:bit(マイクロビット) × 1台
- bitPak:Drive × 1セット
※bitPak:Driveの代わりに、こちらの商品でも作れます。
- micro:bit用ベーシックモジュールキット × 1セット
- micro:bit用電池モジュールキット × 1セット
- ベーシックモジュール用回転サーボモーターセット × 2セット
- bitPak:Drive用パーツセット × 1セット
組み立て方法
プログラミング
右回転、左回転、前進、後進、停止
動画で紹介したプログラム
こんなときは
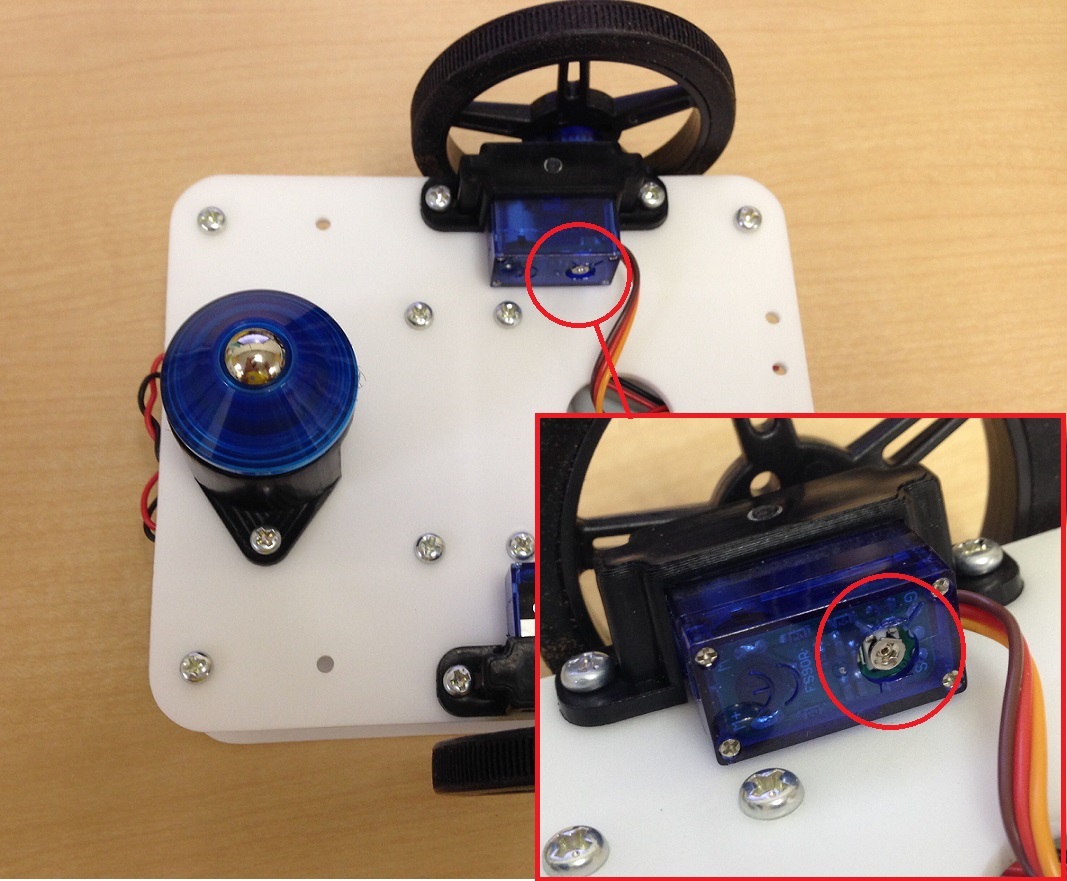
停止命令を出している(回転サーボモーターの角度を90度に指定している)のにタイヤがわずかに動く場合があります。この場合、回転サーボモーターの調整が必要になります。
まずDriveを裏返しにして、ドライバーを使って写真赤丸部分にあるネジ(トリマポテンショメーター)を少しだけ回します。時計回り、反時計回りと少しずつ回して回転サーボモーターが停止したところでドライバーを外して調整終了です。
関連作例

バースデーカード
カードを開くとハッピーバースデーの歌が流れる素敵なカードです。