micro:bit用ロボットベース(接触スイッチ)

使い方やサンプルプログラムは、チュートリアルページを確認してください。
micro:bit使用ピン番号
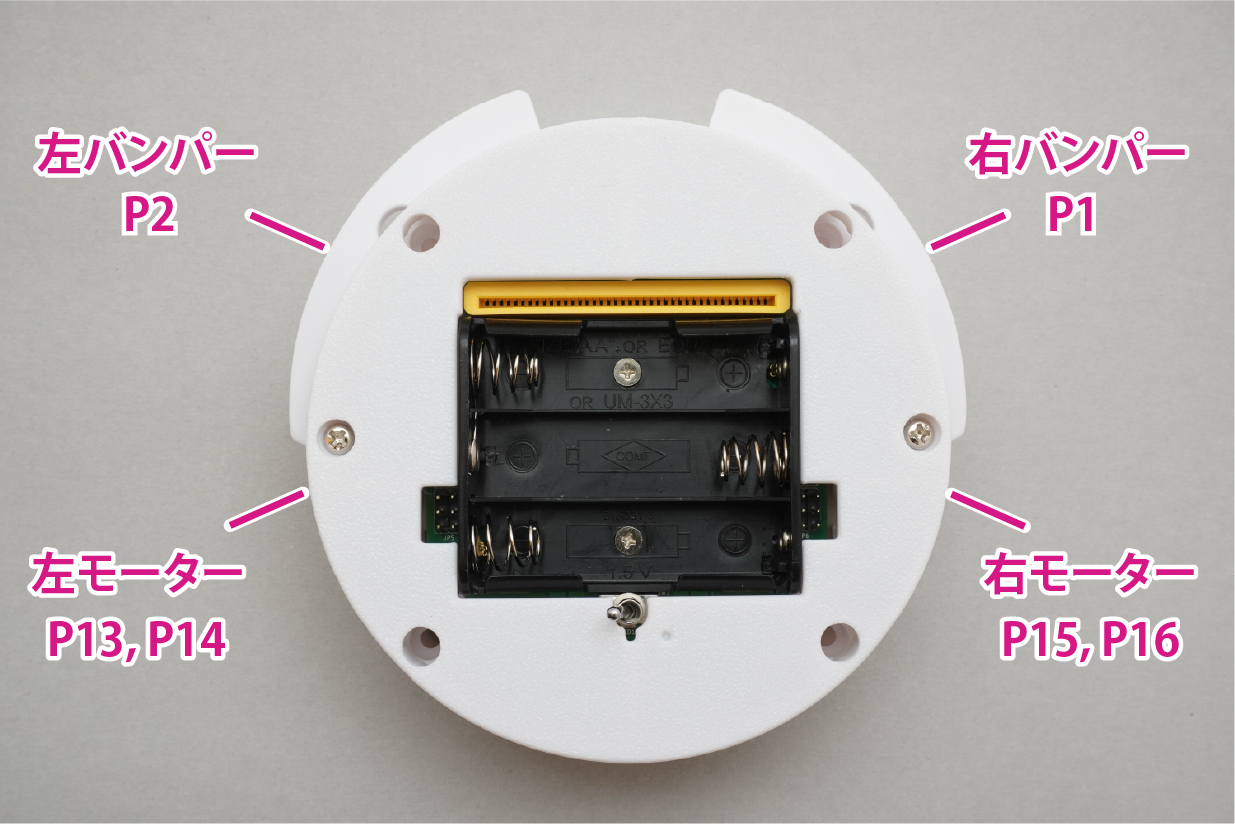
- P1:右バンパー。押されると、デジタル値が「0」になります。
P2:左バンパー。押されると、デジタル値が「0」になります。
P13:左モーターの回転方向を制御します。デジタル値「0」のとき画像上方向に、「1」のとき画像下方向に回転します。
P14:左モーターの回転スピードを制御します。アナログ値「0〜1023」で指定します。数値が大きいほど速く回転します。
P15:右モーターの回転を制御します。デジタル値「0」のとき画像上方向に、「1」のとき画像下方向に回転します。
P16:右モーターの回転スピードを制御します。アナログ値「0〜1023」で指定します。数値が大きいほど速く回転します。
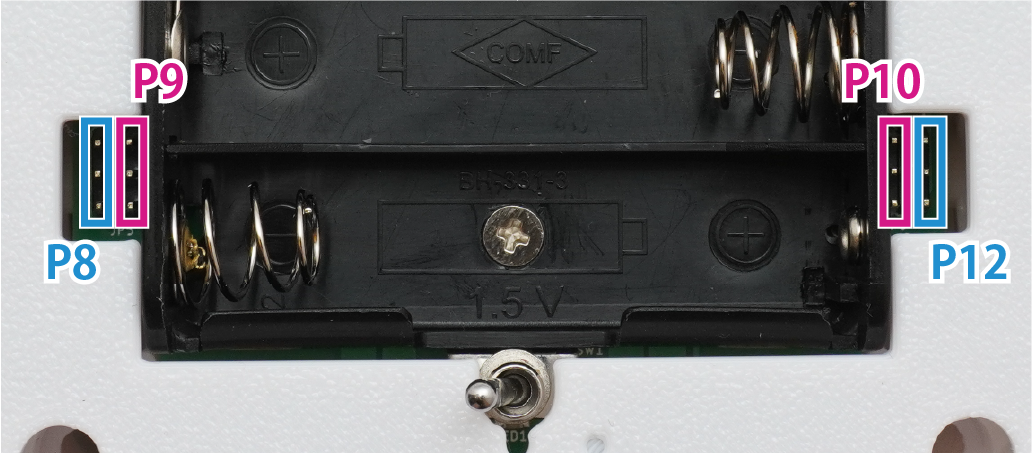
- P8:P8 コネクター
- P9:P9 コネクター
- P10:P10 コネクター
- P12:P12 コネクター
コネクターには、サーボ・LED系のパーツを接続することができます。
関連製品
初期不良/保証について
ご購入に関するご案内 > 保証について
をご確認ください。
お問い合わせ
おまとめでの購入をお考えのお客様には、ご要望により個別手配にて対応いたします。 ご購入に関するご案内 をご確認ください。