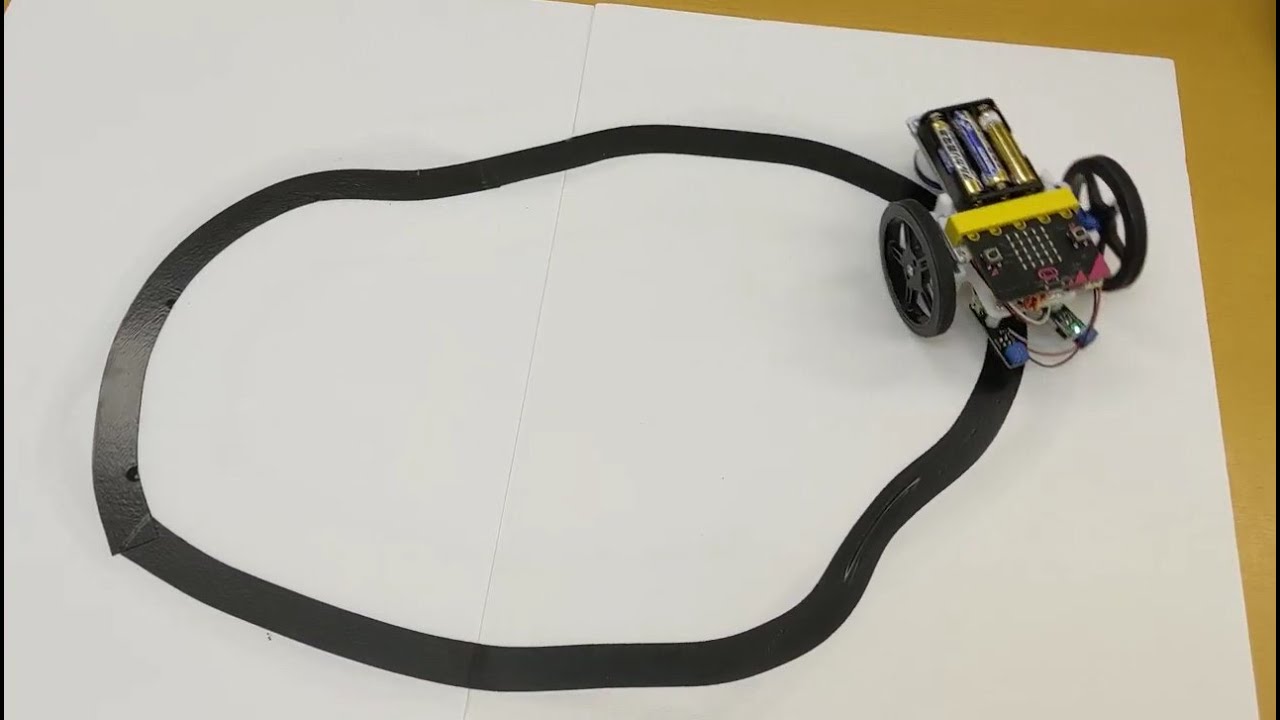
前方の障害物を検知できるライントレーサー
ライントレーサーに、障害物を検知すると停止する機能を追加してみました。
使っている機能
- LED
- 入出力ピン(DCモーター、距離センサーに利用)
用意するもの

micro:bit用ハンダづけキット(ライントレーサー)
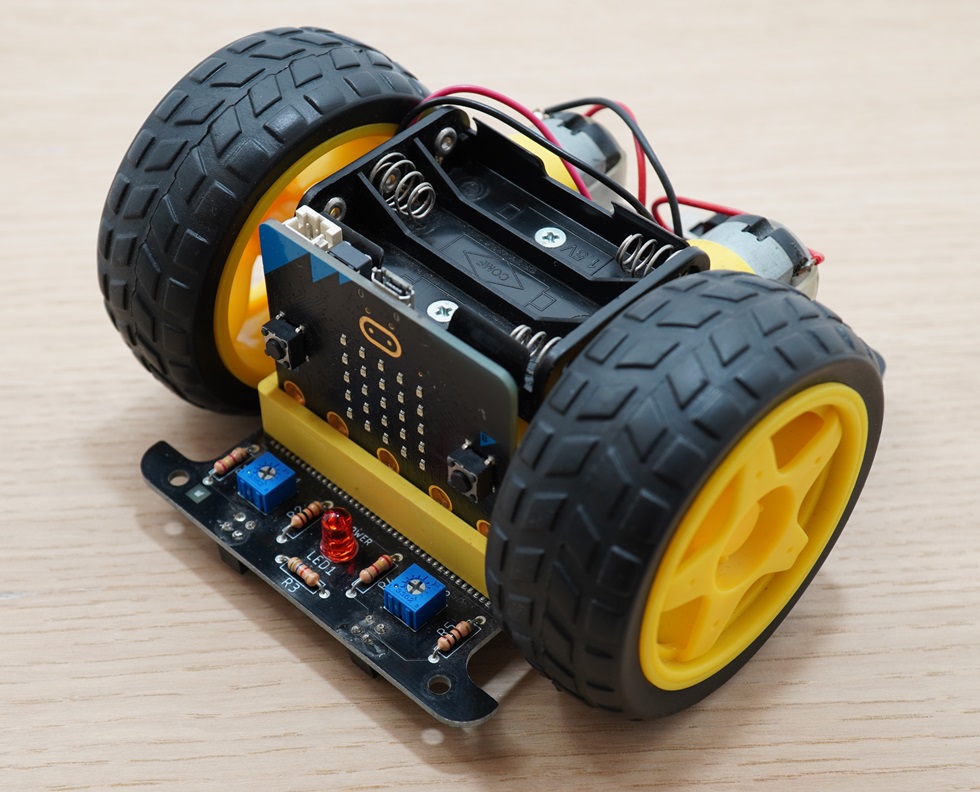
初めて動かす人は、商品ページ内のサンプルプログラムを見ながら、ライントレースする機能を作ってみましょう。
サンプルプログラム
※初めて micro:bit で遊ぶ場合は、micro:bit チュートリアル「初めてのプログラミング」にチャレンジしてみてください。
組立
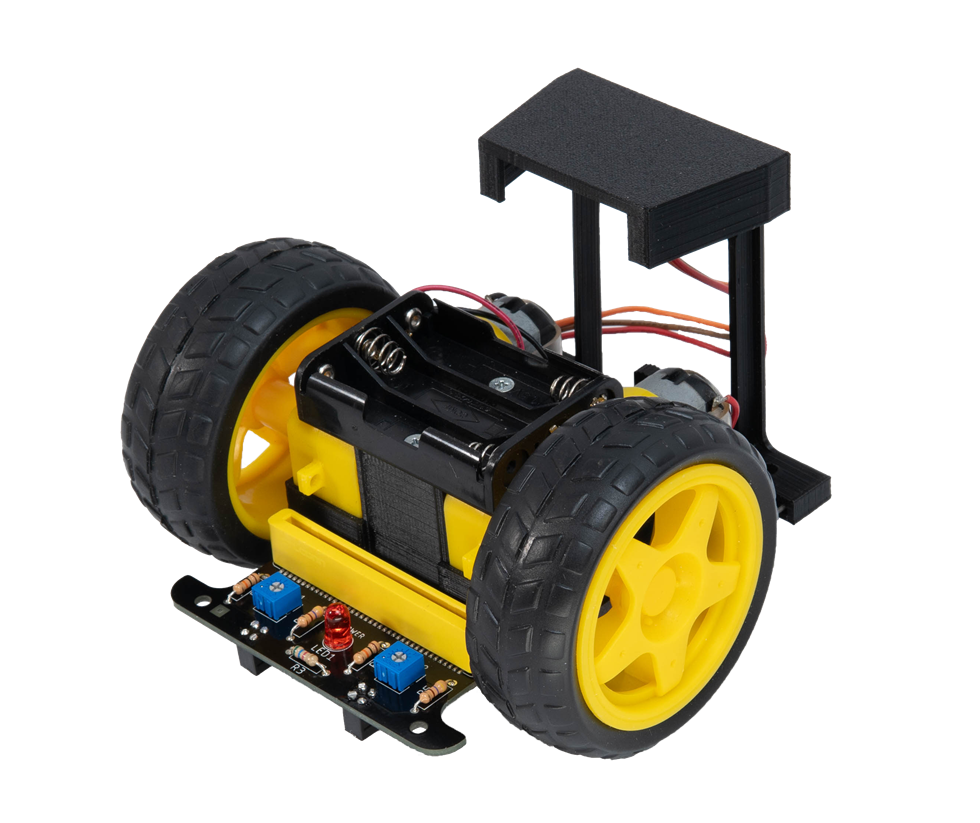
ハンダづけライントレーサー用距離センサーセット2に入っている説明書裏面:組立方法(PDF)を見ながら組み立てましょう。
距離センサー
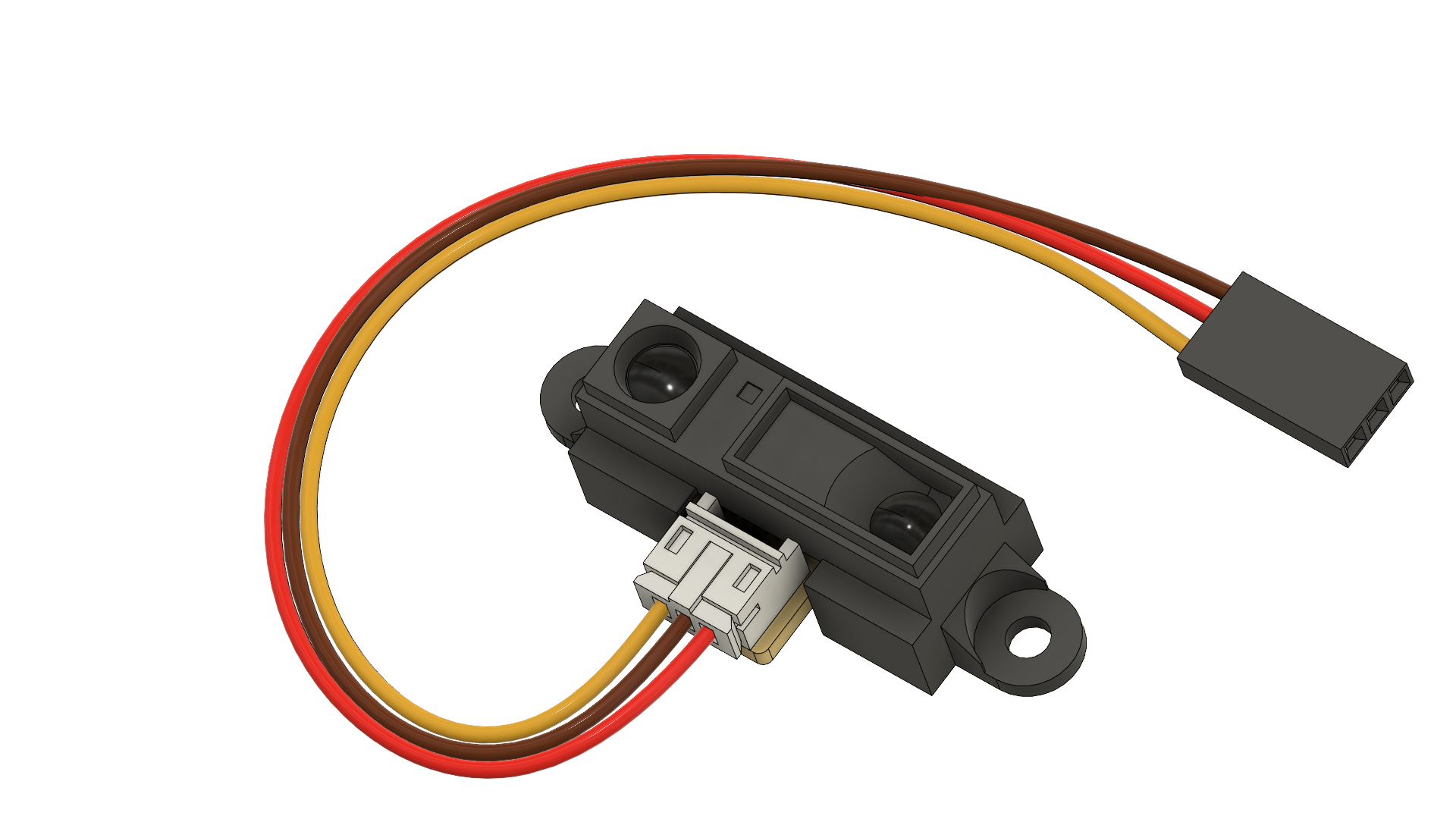
距離センサーを使って、前方の障害物を調べます。距離センサーを初めて使う人は、まず距離センサーのチュートリアルをチェックしてください。
チュートリアル
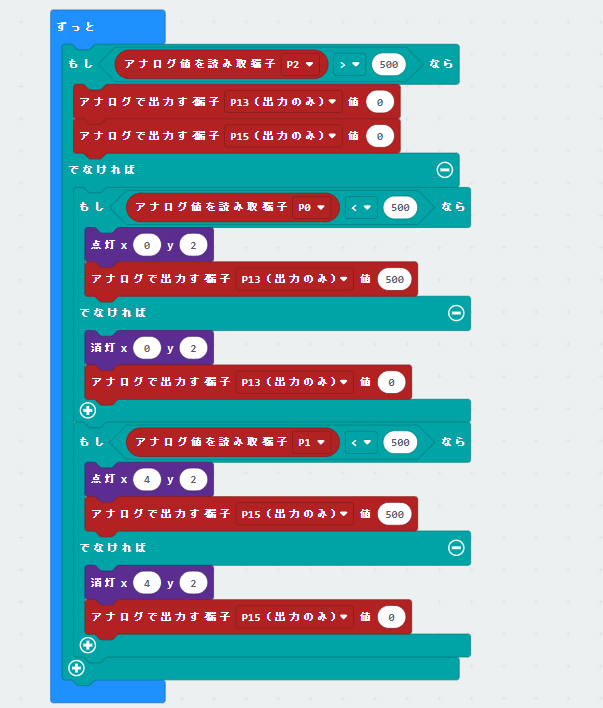
プログラム
前方に障害物を見つけたら停止します。
プログラムURL:https://makecode.microbit.org/_EkdD2sUaD0Fb
※こちら画面のプログラムをMakeCodeで開く方法はチュートリアルを確認してください。
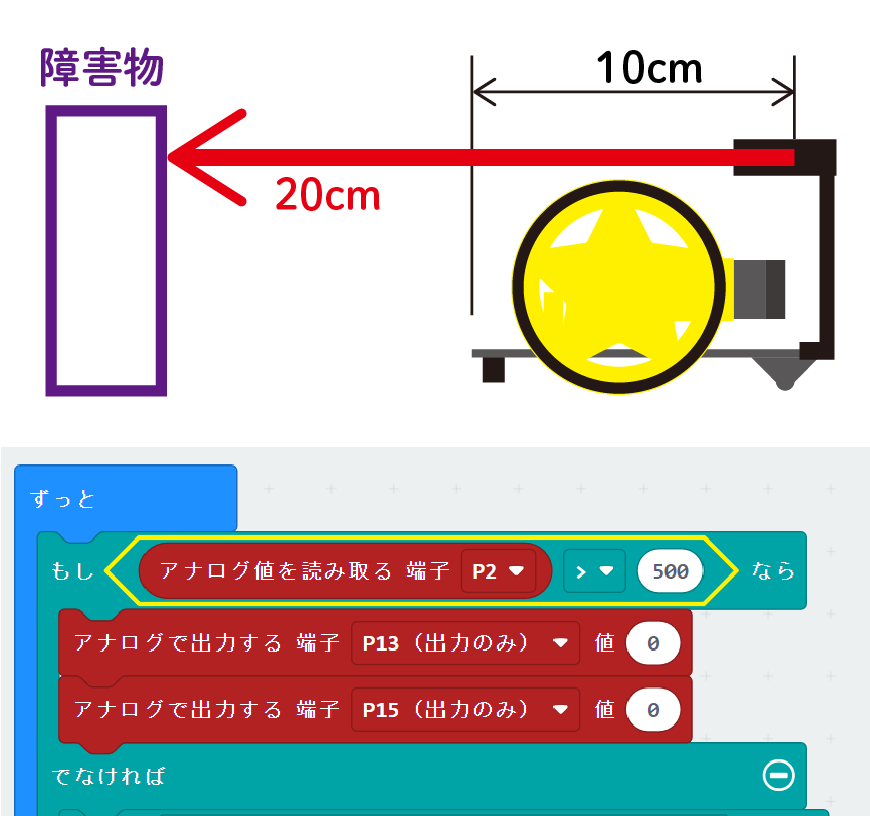 今回は、障害物からセンサーまで約20cm程度 = 距離センサーのアナログ値が500前後のときに停止するようにしました。
今回は、障害物からセンサーまで約20cm程度 = 距離センサーのアナログ値が500前後のときに停止するようにしました。
関連作例
ライントレーサー
bitPak:Minicarにライントレース機能を追加します

衝突検知機能つきミニカー
衝突を検知するミニカーを作ってみました