micro:bit用ハンダづけキット(ライントレーサー)

サンプルコース
A2サイズのコースです。PDF
サンプルプログラム目次
- フォトリフレクターの値を調べてみよう(説明書プログラムSTEP1)
- 白色?黒色? 判定するプログラムを作ってみよう(説明書プログラムSTEP2)
- モーターを動かしてみよう
- ライントレースの仕組みを考えよう(説明書プログラムSTEP3)
- ライントレーサーを完成させよう(説明書プログラムSTEP4)
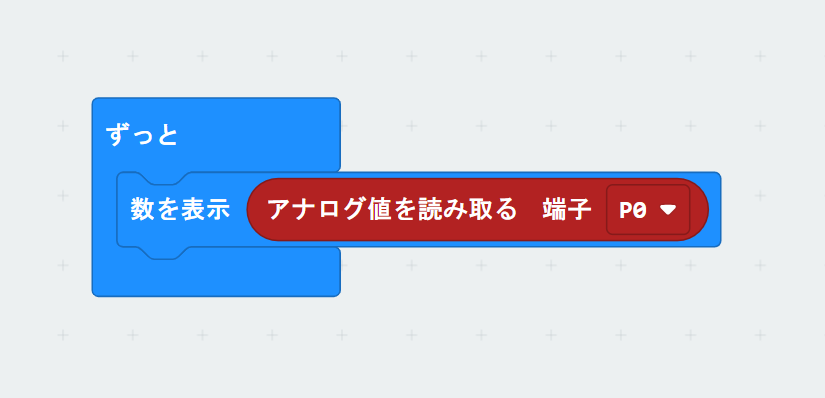
フォトリフレクターの値を調べてみよう(説明書プログラムSTEP1)
ボタンA側のフォトリフレクターの値が、micro:bitのLED画面に表示されます。値の範囲は、0~1023です。白いときに小さく、黒いときに大きくなります。micro:bitのLEDにフォトリフレクターの値を表示して確認してみましょう!
MakeCodeプログラムURL:https://makecode.microbit.org/_3uHCK1cyAPq5
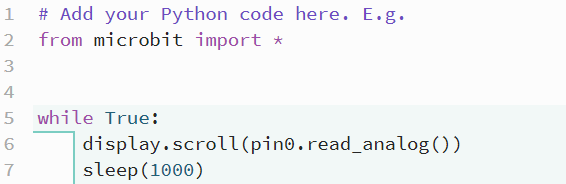
microPythonプログラム:step1.py
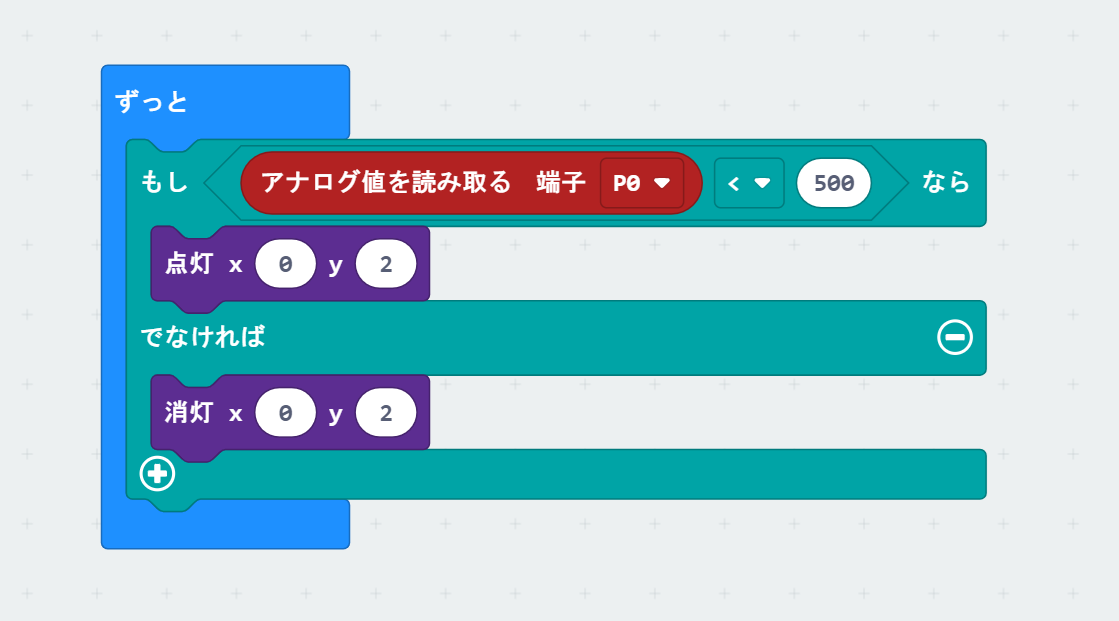
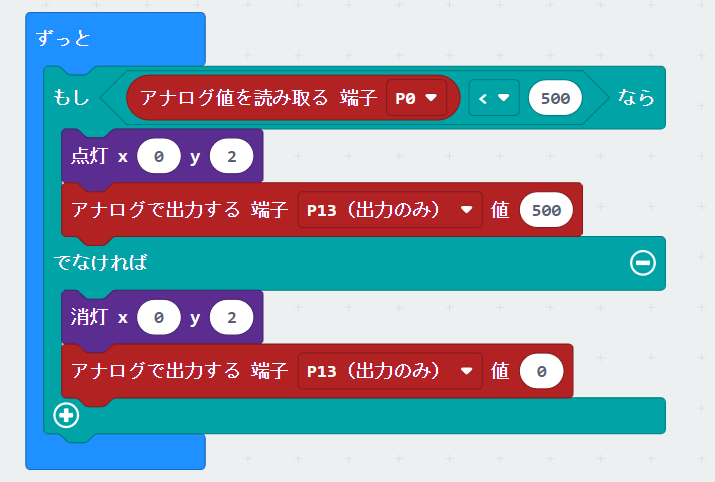
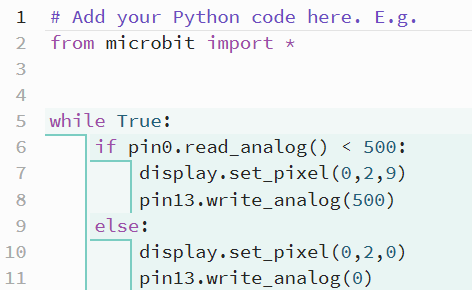
白色?黒色? 判定するプログラムを作ってみよう(説明書プログラムSTEP2)
ボタンA側のフォトリフレクターの値をもとに、白色/黒色を判定します。白色と判定したとき、micro:bit のLEDが点灯します。
MakeCodeプログラムURL:https://makecode.microbit.org/_gieYo0L68hYq
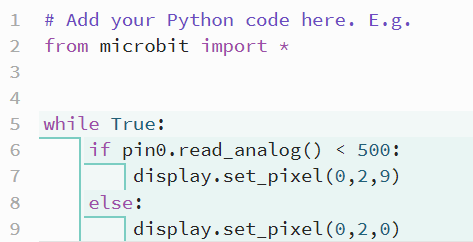
microPythonプログラム:step2.py
モーターを動かしてみよう
ボタンAを押したら1秒前進、ボタンBを押したら1秒後進します。※説明書P9.モーターのハンダ付けで赤・黒配線を逆にとりつけていたら、値「0」のとき後進します。
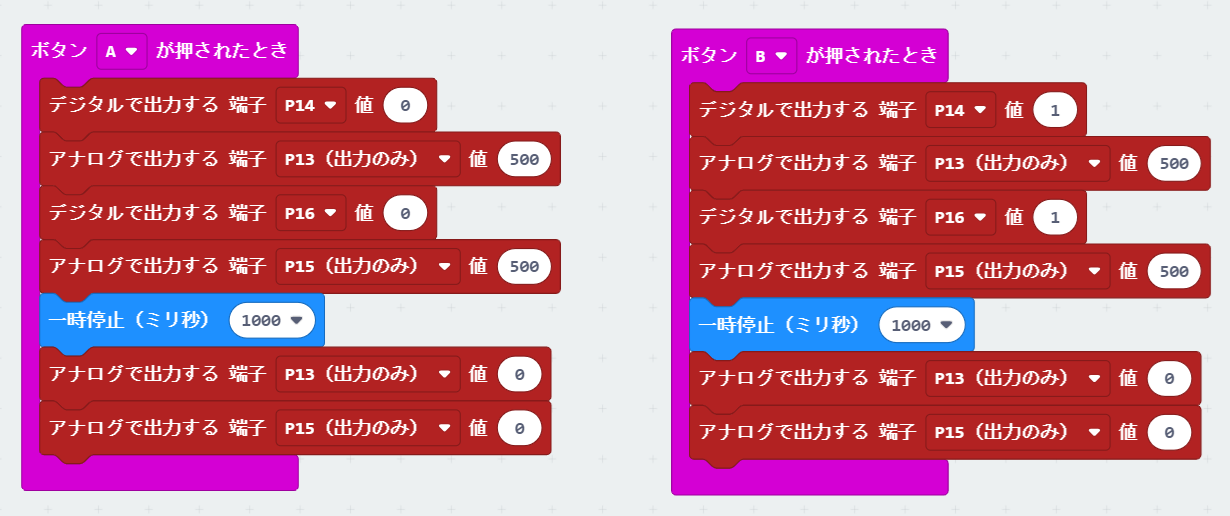
MakeCodeプログラムURL:https://makecode.microbit.org/_01C5yHMRkHKs
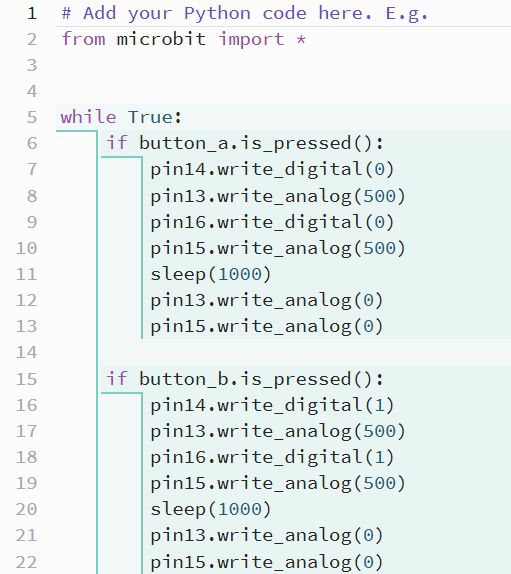
microPythonプログラム:check-motors.py
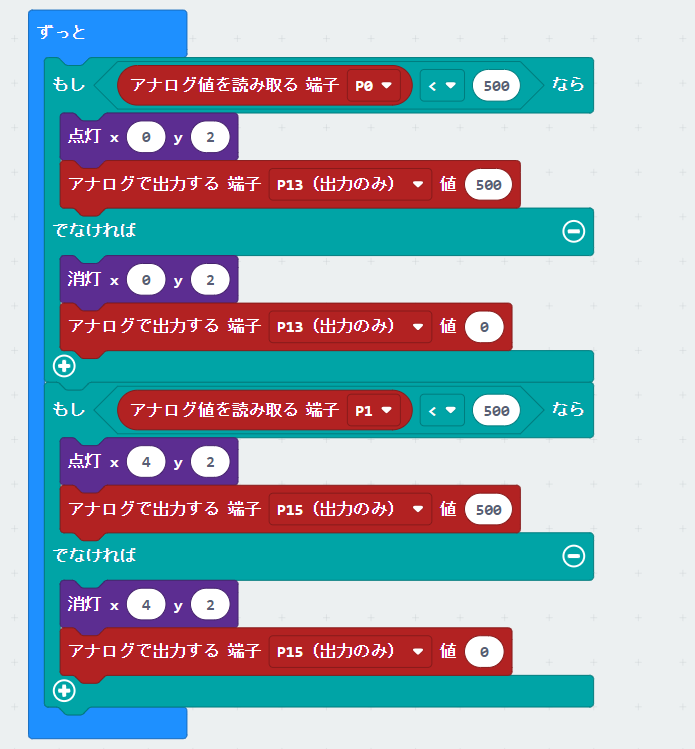
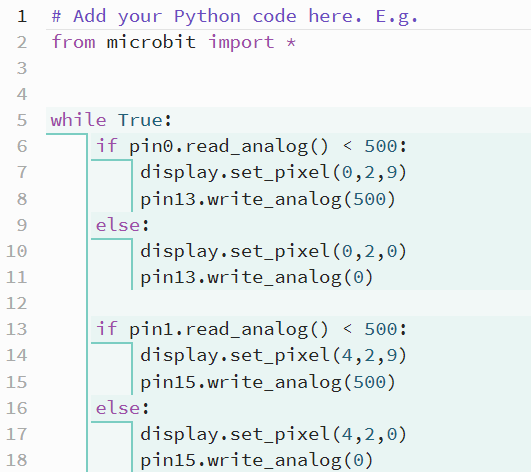
ライントレースの仕組みを考えよう(説明書プログラムSTEP3)
micro:bit Aボタン側のフォトリフレクターが白/黒と判定した場合に、同じ側のモーターをどうコントロールすればライントレースできるのか考えながらプログラムを作ってみましょう。
MakeCodeプログラムURL:https://makecode.microbit.org/_hH4J2xLsV0CW
microPythonプログラム:step3.py
ライントレーサーを完成させよう(説明書プログラムSTEP4)
micro:bit Bボタン側のフォトリフレクター、モーターをコントロールするプログラムを追加して、実際にライントレースできるか動かしてみましょう。カーブを曲がれなかった場合は、モーターの速度を調整するなど工夫しましょう。
MakeCodeプログラムURL:https://makecode.microbit.org/_Vsg6C0fpEctW
microPythonプログラム:step4.py
関連製品
- micro:bit (マイクロビット)
- ライントレーサー用パネルセット
- ライントレーサー用パネルセット(十字)
- ハンダづけライントレーサー用バンパーセット
- ハンダづけライントレーサー用距離センサーセット
初期不良/保証について
ご購入に関するご案内 > 保証について
をご確認ください。
お問い合わせ
おまとめでの購入をお考えのお客様には、ご要望により個別手配にて対応いたします。 ご購入に関するご案内 をご確認ください。