サーボモーター入門にピッタリ!
プログラムで歩きかたをアレンジしよう。
使っている機能
- ボタン
- 入出力ピン(サーボモーターに利用)
用意するもの
スイッチエデュケーション商品
- micro:bit(マイクロビット) × 1台
- ワークショップモジュール × 1台
- bitPak:しゃくとり虫用パーツセット × 1セット
その他
- プラスドライバー(No.1)
- 単4電池 × 3本
- パソコン/タブレット
- USBケーブル(micro:bit 側はUSB 2.0 Micro-B)※パソコンを使う場合のみ
組立
商品に同梱している組立説明書をご確認ください。説明書PDFはこちら。
しゃくとり虫のしくみ
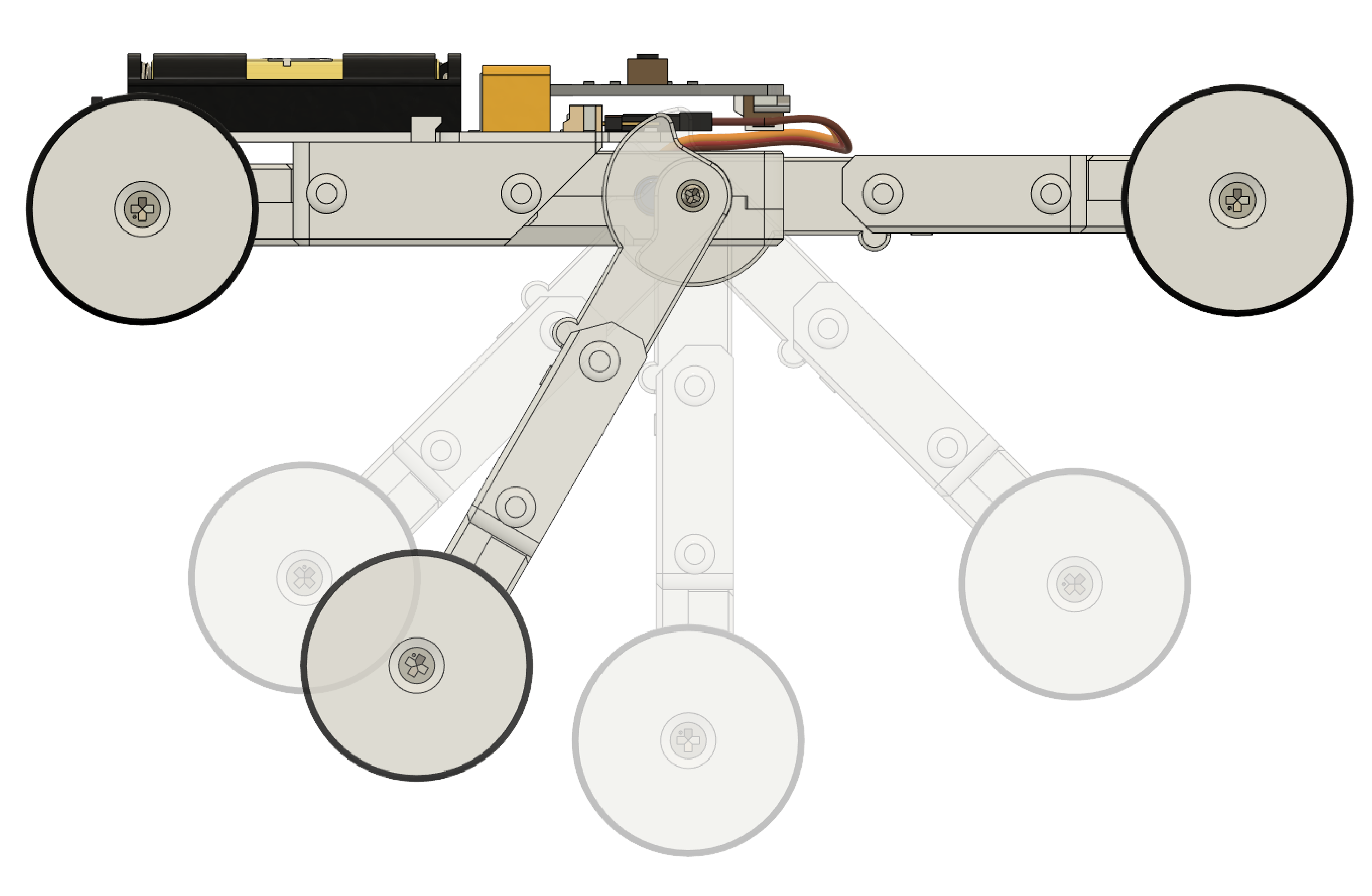
しゃくとり虫ロボットはサーボモーターを1個使って動かします。
サーボモーターを動かすと、ロボットは右図のように動きます。
micro:bit でサーボモーターを動かしてロボットを伸び縮みして歩かせます。

サーボモーターについて
サーボモーターを初めて使う人は、まずチュートリアルの「サーボホーン」「micro:bitとの接続方法」「プログラミング(MakeCode)」をチェックしましょう。
※初めて micro:bit で遊ぶ場合は、micro:bit チュートリアル「初めてのプログラミング」にチャレンジしてみてください。
プログラミング
 使うブロックは、「高度なブロック」>「入出力端子」>「サーボ 出力する」です。「端子」にはサーボモーターを接続しているピン番号を、「角度」にはサーボホーンの向きを指定します。
使うブロックは、「高度なブロック」>「入出力端子」>「サーボ 出力する」です。「端子」にはサーボモーターを接続しているピン番号を、「角度」にはサーボホーンの向きを指定します。
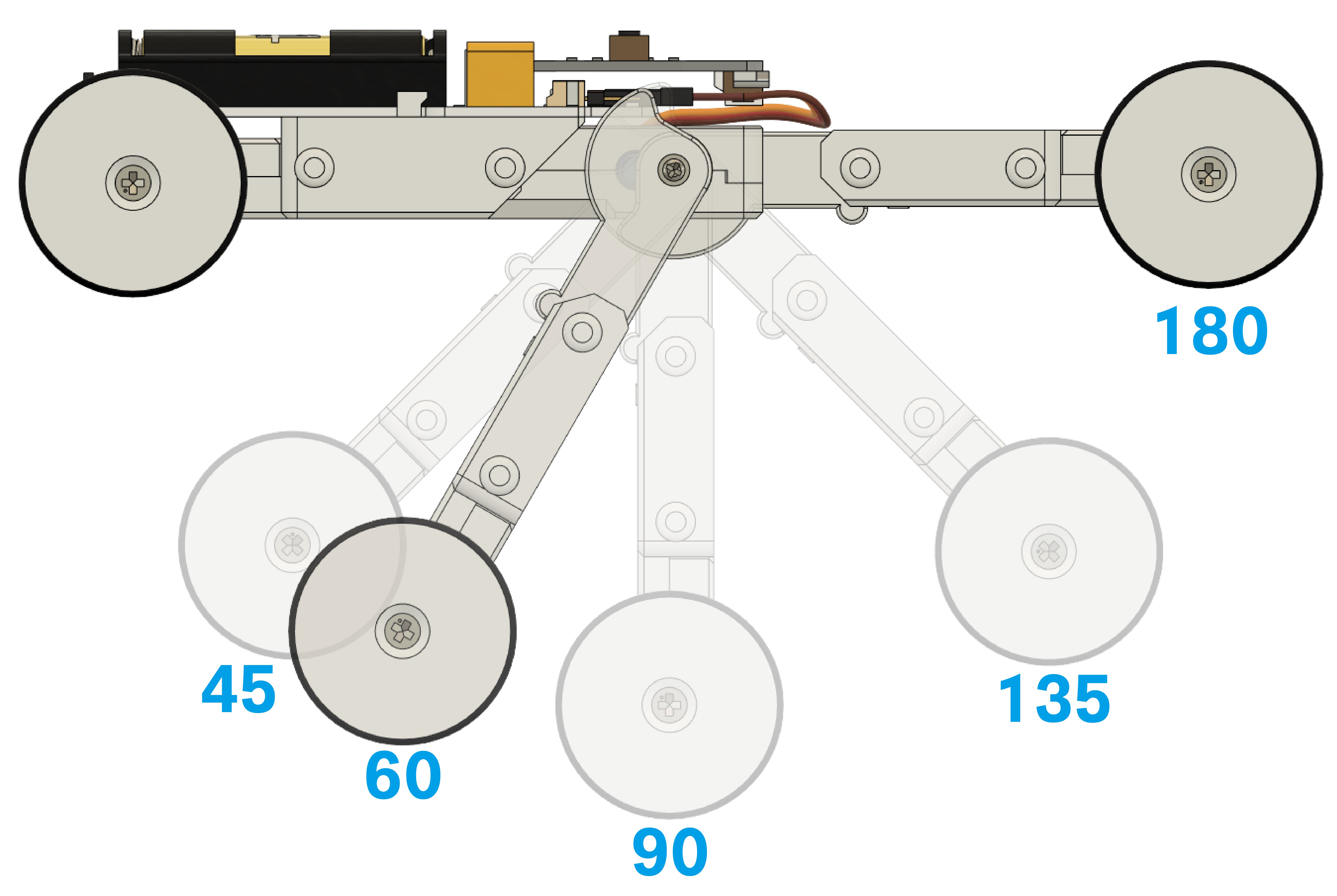 しゃくとり虫ロボットと角度の関係です。プログラミングの際に参考にしましょう。
しゃくとり虫ロボットと角度の関係です。プログラミングの際に参考にしましょう。
組立の確認

こちらのプログラムを micro:bit に書き込んで、ワークショップモジュールの電源をONにしてみてください。
※「端子」はサーボモーターを接続しているピン番号に設定してください。
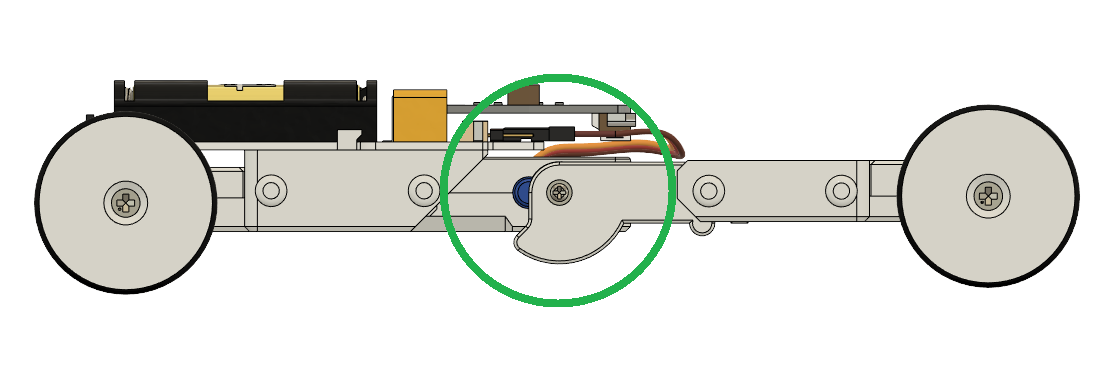
このとき、しゃくとり虫ロボットがまっすぐになっていたらOKです(少し曲がってても大丈夫です)。
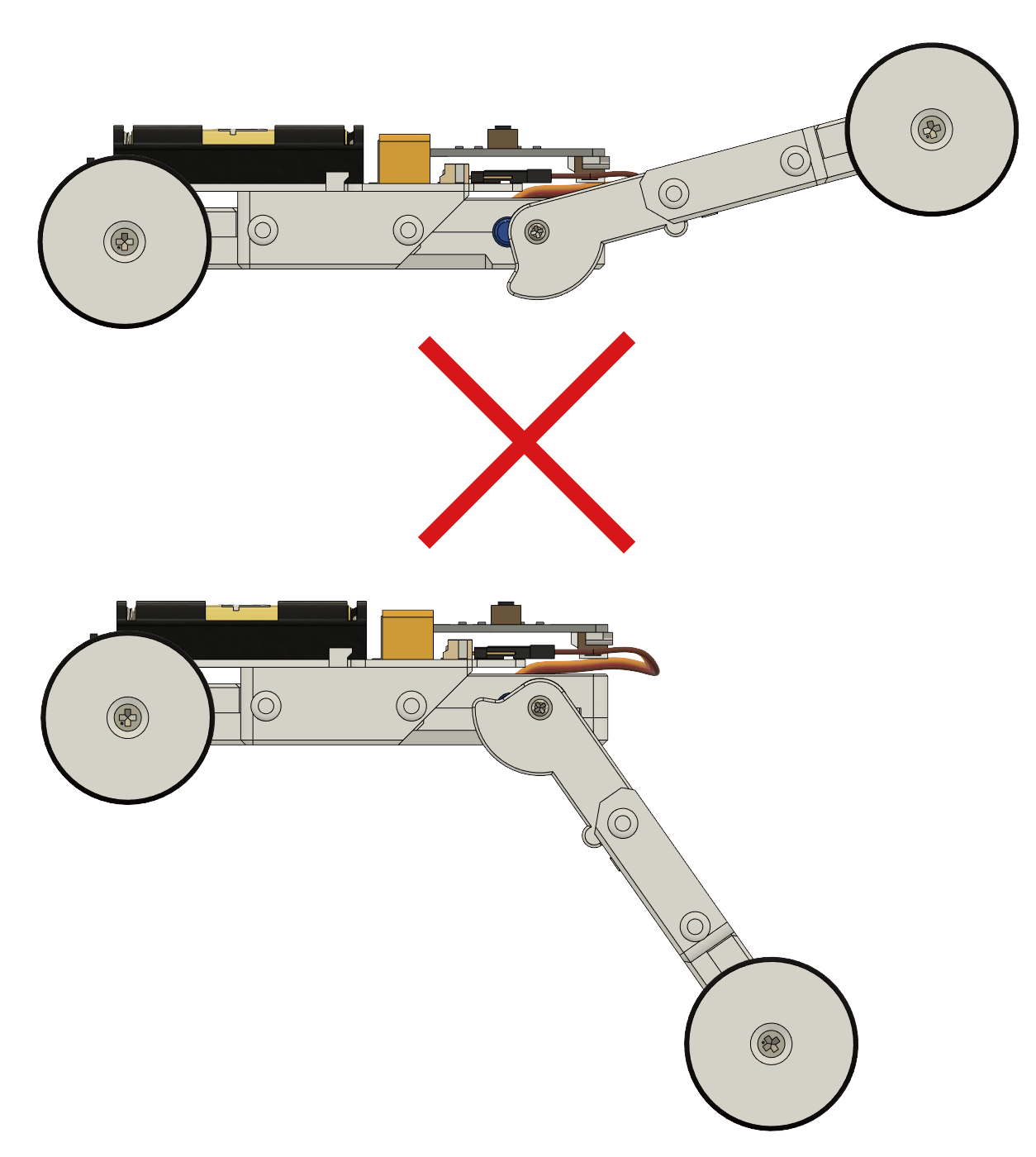
左図のように、逆ぞりになって micro:bit がロボットのボディにぶつかっていたり、大きく曲がっている場合は
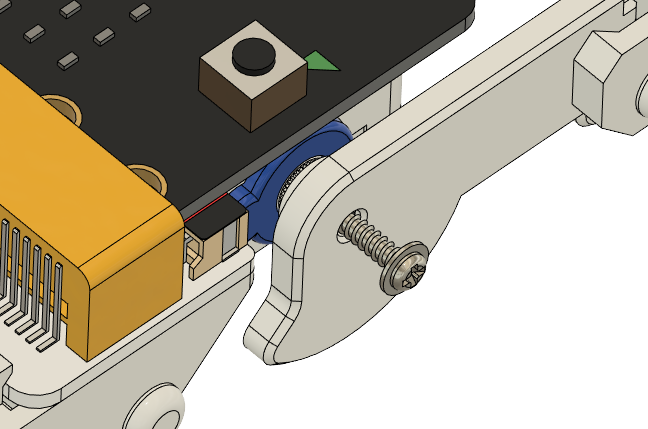
サーボホーンのネジを一度外して、まっすぐな姿勢になるようにつけなおしてください。
ステップ 1:動かしてみよう
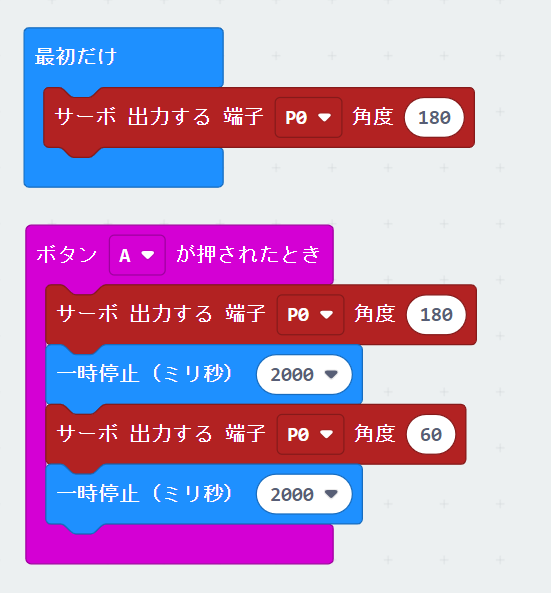
ボタン A を押したら、ロボットが「伸びて(2秒停止) → 縮んで(2秒停止)」を1回行うプログラムを作って動かしてみましょう。
プログラムURL:https://makecode.microbit.org/_fVCExRaYoJAD
※こちら画面のプログラムをMakeCodeで開く方法はチュートリアルを確認してください。
ステップ 2:くりかえし動かしてみよう
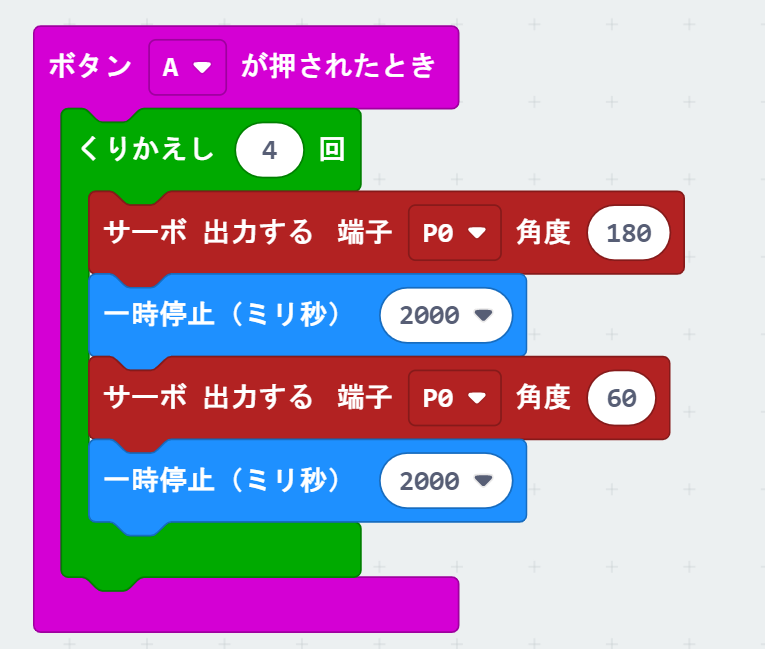
1回ボタンを押したらたくさん歩くように、「伸びて(2秒停止) → 縮んで(2秒停止)」を4回くりかえすプログラムにしましょう。
※「くりかえし」ブロックは「ループ」にあります。
プログラムURL:https://makecode.microbit.org/_J0k4Rs1xa3aY
※こちら画面のプログラムをMakeCodeで開く方法はチュートリアルを確認してください。
速く進むプログラムにチャレンジするのも楽しそうです。※「角度の数値」を小さくしすぎるとロボットのボディがぶつかってしまうので注意です。
ステップ 3:ゆっくり動かしてみよう
紹介したプログラムだと、角度が変わるとき急な動きになります。これは、「180」「60」と差が大きい2つの角度で動かしているからです。試しに、こちらのプログラムを作ってボタン B を押してみましょう。
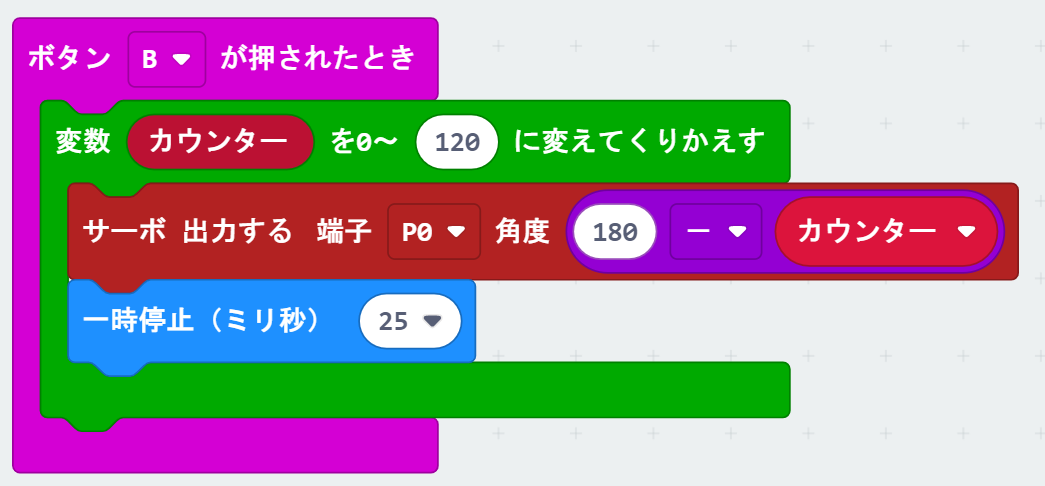
すごく短い時間(25ミリ秒=0.025秒)で、180、179、178、177、… 62、61、60と1ずつ減らした角度でロボットを動かしています。
※「ボタン B が押されたとき」ブロックは「ボタン A が押されたとき」ブロックの「▼」をクリックして用意します。
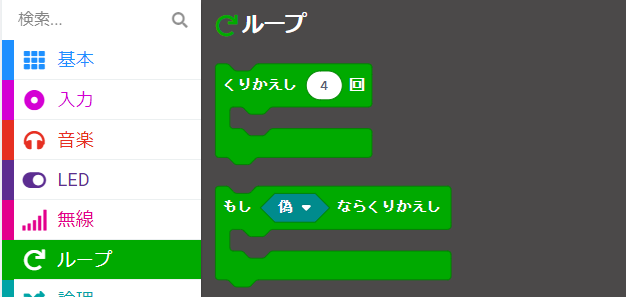 ある動作をくりかえし行いたい場合は、「ループ」のブロックを使うとかんたんにプログラムを作ることができます。
ある動作をくりかえし行いたい場合は、「ループ」のブロックを使うとかんたんにプログラムを作ることができます。
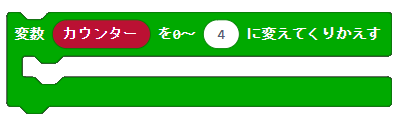 ゆっくり動かす部分は、サーボの角度以外は同じ命令のくりかえしなので、「変数 カウンター を0~4 に変えてくりかえす」ブロックを使いました。
ゆっくり動かす部分は、サーボの角度以外は同じ命令のくりかえしなので、「変数 カウンター を0~4 に変えてくりかえす」ブロックを使いました。
ループブロックについては、チュートリアルを参考にしてください:こちら
「60」から「180」に「1」ずつ増やすプログラムを追加しましょう。さらにこれをくりかえしたら完成です。
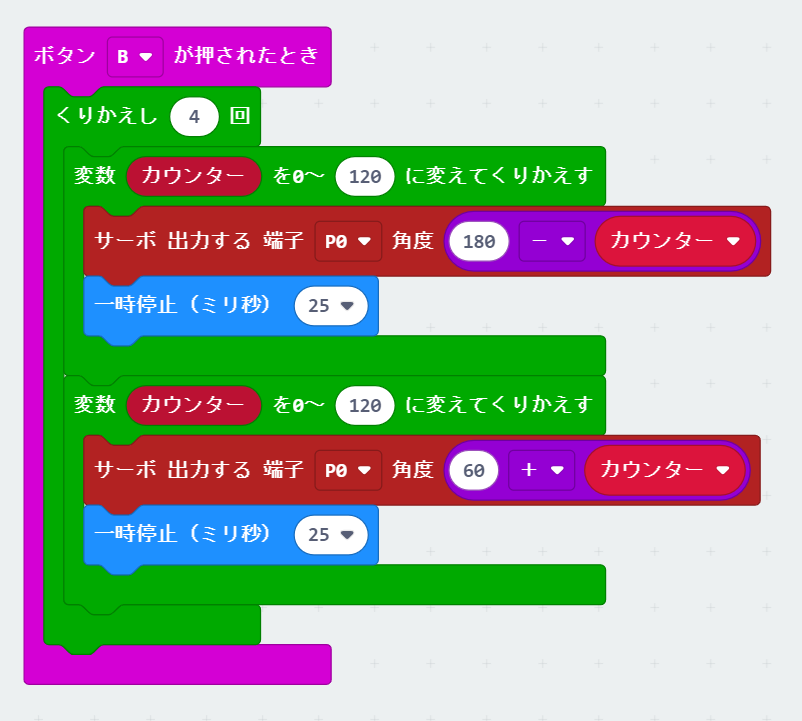
プログラムURL:https://makecode.microbit.org/_bKxVot7agWiW
※こちら画面のプログラムをMakeCodeで開く方法はチュートリアルを確認してください。
デコレーション
目をつけたり、模様をかいたりデコレーションして、オリジナルしゃくとり虫を作りましょう!